“后门准则”的版本间的差异
| 第1行: | 第1行: | ||
=== 为何需要后门准则 === | === 为何需要后门准则 === | ||
| − | + | 在结构因果图中,我们往往需要估计变量<math>X</math>对另一个变量<math>Y</math>的因果效应,而因果图结构也随着节点数量增加变得非常复杂。针对因果效应评估问题,后门准则能快速根据图结构估计变量<math>X</math>对变量<math>Y</math>的因果效应,是因果推断中使用非常广泛的基础准则之一。 | |
=== 后门准则定义 === | === 后门准则定义 === | ||
| − | |||
给定有向无环图中的一对有序变量<math>(X,Y)</math>,如果变量集合<math>Z</math>满足:<math>Z</math>中没有<math>X</math>的后代节点,且<math>Z</math>阻断了<math>X</math>与<math>Y</math>之间的每条含有指向<math>X</math>的路径,则称<math>Z</math>满足关于<math>(X,Y)</math>的后门准则。 | 给定有向无环图中的一对有序变量<math>(X,Y)</math>,如果变量集合<math>Z</math>满足:<math>Z</math>中没有<math>X</math>的后代节点,且<math>Z</math>阻断了<math>X</math>与<math>Y</math>之间的每条含有指向<math>X</math>的路径,则称<math>Z</math>满足关于<math>(X,Y)</math>的后门准则。 | ||
| − | 如果变量集合<math>Z</math>满足<math>(X,Y)</math> | + | 如果变量集合<math>Z</math>满足<math>(X,Y)</math>的后门准则,那么<math>X</math>对<math>Y</math>的因果效应可以对变量集<math>Z</math>的校正得到,即对<math>Z</math>进行求和,具体表现如下: |
<math> | <math> | ||
P(Y=y|do(X=x)) = \sum_zP(Y=y|X=x, Z=z)P(Z=z) | P(Y=y|do(X=x)) = \sum_zP(Y=y|X=x, Z=z)P(Z=z) | ||
| 第13行: | 第12行: | ||
=== 后门准则背后逻辑 === | === 后门准则背后逻辑 === | ||
| − | + | 当试图寻找变量集合<math>Z</math>来估计<math>X</math>对<math>Y</math>的因果效应时,寻找一个条件节点集合<math>Z</math>使得能阻断任何含有指向<math>X</math>的后门路径(指可能使得<math>X</math>和<math>Y</math>相关但并不传递X产生的因果效应),因为如果不阻断这些后门路径,它们会混淆<math>X</math>对<math>Y</math>的效应。后门准则包含两个方面的路径检查: | |
| − | # | + | # 阻断任何变量<math>X</math>到变量<math>Y</math>的后门路径/伪路径(伪路径是指不同于从变量<math>X</math>指向变量<math>Y</math>有向路径的所有其他路径); |
# 确保现在所有从变量<math>X</math>到变量<math>Y</math>的路径不变。 | # 确保现在所有从变量<math>X</math>到变量<math>Y</math>的路径不变。 | ||
| − | + | 第一个检查是为了确保条件节点集合不能包含变量<math>X</math>的后代节点,因为在进行评估<math>X</math>对变量<math>Y</math>的因果效应时,会对变量<math>X</math>采取干预,继而影响变量<math>X</math>的后代节点,从而影响变量<math>Y</math>,但以<math>X</math>的后代节点为条件会阻断这些路径。 | |
| − | |||
| − | |||
| − | + | 第二个检查是为了阻断所有一切伪路径以及条件节点集合引入的新伪路径。 | |
| − | |||
=== 后门准则实例 === | === 后门准则实例 === | ||
2021年7月27日 (二) 17:11的版本
为何需要后门准则
在结构因果图中,我们往往需要估计变量[math]\displaystyle{ X }[/math]对另一个变量[math]\displaystyle{ Y }[/math]的因果效应,而因果图结构也随着节点数量增加变得非常复杂。针对因果效应评估问题,后门准则能快速根据图结构估计变量[math]\displaystyle{ X }[/math]对变量[math]\displaystyle{ Y }[/math]的因果效应,是因果推断中使用非常广泛的基础准则之一。
后门准则定义
给定有向无环图中的一对有序变量[math]\displaystyle{ (X,Y) }[/math],如果变量集合[math]\displaystyle{ Z }[/math]满足:[math]\displaystyle{ Z }[/math]中没有[math]\displaystyle{ X }[/math]的后代节点,且[math]\displaystyle{ Z }[/math]阻断了[math]\displaystyle{ X }[/math]与[math]\displaystyle{ Y }[/math]之间的每条含有指向[math]\displaystyle{ X }[/math]的路径,则称[math]\displaystyle{ Z }[/math]满足关于[math]\displaystyle{ (X,Y) }[/math]的后门准则。
如果变量集合[math]\displaystyle{ Z }[/math]满足[math]\displaystyle{ (X,Y) }[/math]的后门准则,那么[math]\displaystyle{ X }[/math]对[math]\displaystyle{ Y }[/math]的因果效应可以对变量集[math]\displaystyle{ Z }[/math]的校正得到,即对[math]\displaystyle{ Z }[/math]进行求和,具体表现如下: [math]\displaystyle{ P(Y=y|do(X=x)) = \sum_zP(Y=y|X=x, Z=z)P(Z=z) }[/math]
后门准则背后逻辑
当试图寻找变量集合[math]\displaystyle{ Z }[/math]来估计[math]\displaystyle{ X }[/math]对[math]\displaystyle{ Y }[/math]的因果效应时,寻找一个条件节点集合[math]\displaystyle{ Z }[/math]使得能阻断任何含有指向[math]\displaystyle{ X }[/math]的后门路径(指可能使得[math]\displaystyle{ X }[/math]和[math]\displaystyle{ Y }[/math]相关但并不传递X产生的因果效应),因为如果不阻断这些后门路径,它们会混淆[math]\displaystyle{ X }[/math]对[math]\displaystyle{ Y }[/math]的效应。后门准则包含两个方面的路径检查:
- 阻断任何变量[math]\displaystyle{ X }[/math]到变量[math]\displaystyle{ Y }[/math]的后门路径/伪路径(伪路径是指不同于从变量[math]\displaystyle{ X }[/math]指向变量[math]\displaystyle{ Y }[/math]有向路径的所有其他路径);
- 确保现在所有从变量[math]\displaystyle{ X }[/math]到变量[math]\displaystyle{ Y }[/math]的路径不变。
第一个检查是为了确保条件节点集合不能包含变量[math]\displaystyle{ X }[/math]的后代节点,因为在进行评估[math]\displaystyle{ X }[/math]对变量[math]\displaystyle{ Y }[/math]的因果效应时,会对变量[math]\displaystyle{ X }[/math]采取干预,继而影响变量[math]\displaystyle{ X }[/math]的后代节点,从而影响变量[math]\displaystyle{ Y }[/math],但以[math]\displaystyle{ X }[/math]的后代节点为条件会阻断这些路径。
第二个检查是为了阻断所有一切伪路径以及条件节点集合引入的新伪路径。
后门准则实例
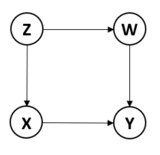
图1:[math]\displaystyle{ X }[/math]:新药;[math]\displaystyle{ Y }[/math]:痊愈率;[math]\displaystyle{ W }[/math]:体重;[math]\displaystyle{ Z }[/math]:经济社会地位
在图1的因果图中,我们搜索满足从X到Y后门准则的观察变量,可以发现,节点[math]\displaystyle{ W }[/math](非[math]\displaystyle{ X }[/math]的后代)阻断了指向[math]\displaystyle{ X }[/math]的后门路路径[math]\displaystyle{ X\leftarrow Z \rightarrow W \rightarrow Y }[/math],但没有创造新的后门路径或者改变从X到Y的有向路径,因此节点W满足后门准则,因此,只要校正W就能得到X到Y的因果效应,即
[math]\displaystyle{ P(Y=y|do(X=x)) = \sum_wP(Y=y|X=x, W=w)P(W=w) }[/math]
在寻找满足后门准则的节点集合时,需要特别关注对撞节点。
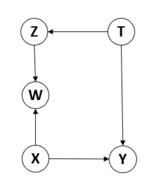
图2
在图2中,没有存在从[math]\displaystyle{ Y }[/math]到[math]\displaystyle{ X }[/math]的伪路径。但是,如果节点集合中包含对撞节点W,则打开了路径[math]\displaystyle{ X\rightarrow W \leftarrow Z\leftarrow T\rightarrow Y }[/math],该路径不是从[math]\displaystyle{ X }[/math]到[math]\displaystyle{ Y }[/math]的因果路径,因此是伪路径,打开这条路径会产生偏差并导致错误的答案。这也意味着,对[math]\displaystyle{ W }[/math]的每个值分别计算[math]\displaystyle{ X }[/math]和[math]\displaystyle{ Y }[/math]的关联性,不会得到[math]\displaystyle{ X }[/math]对[math]\displaystyle{ Y }[/math]的因果效应,甚至对于[math]\displaystyle{ W }[/math]的每个值计算[math]\displaystyle{ X }[/math]和[math]\displaystyle{ Y }[/math]的关联性也是错误的。
那么,当指定[math]\displaystyle{ W }[/math]为一个确定值[math]\displaystyle{ w }[/math]时,如何计算[math]\displaystyle{ X }[/math]对[math]\displaystyle{ Y }[/math]的因果效应?解决方法是选择其他变量来阻断由[math]\displaystyle{ W }[/math]打开的路径。例如,选择变量[math]\displaystyle{ T }[/math]为条件,仍可阻断[math]\displaystyle{ X\leftarrow Z \rightarrow W \rightarrow Y }[/math],因此,为了计算[math]\displaystyle{ w }[/math]-特定因果效应[math]\displaystyle{ P(y|do(x),w) }[/math],可以对变量[math]\displaystyle{ T }[/math]进行校正,
[math]\displaystyle{ P(Y=y|do(X=x), W=w) = \sum_tP(Y=y|X=x, W=w,T=t)P(T=t|X=x, W=w) }[/math]
[math]\displaystyle{ w }[/math]-特定因果效应[math]\displaystyle{ P(y|do(x),w) }[/math]检验[math]\displaystyle{ X }[/math]对[math]\displaystyle{ Y }[/math]的因果效应依据[math]\displaystyle{ W }[/math]值的变化而改变。
有时候,对对撞节点的校正是不可避免的。

图3
在图3中,从[math]\displaystyle{ X }[/math]到[math]\displaystyle{ Y }[/math]有四条后门路径,而且都经过[math]\displaystyle{ Z }[/math]节点,其中[math]\displaystyle{ Z }[/math]节点在路劲[math]\displaystyle{ X\leftarrow E \rightarrow Z \leftarrow A \rightarrow Y }[/math]中是一个对撞节点,以[math]\displaystyle{ Z }[/math]为条件会导致这条路径联通。因为,要阻断所有后门路径,需要至少包含一个下面集合变量中[math]\displaystyle{ \{Z, A \} }[/math]。